2 batteries of our T-rex was stolen during I flew the T-rex. I was concentrated on practicing the side hovering and didn't know who took these 2 batteries away.
Why? I don't know who else also fly electric RC helicopter around here. Maybe someone regarded my as garbage... because I put them on the ground?
Maybe someone didn't like to see me fly helicopters on the grass. Okay!! I will fly!! I will fly our helicopters everyday!!
\__/
Wednesday, December 27, 2006
Tuesday, December 19, 2006
[Heli] ALIGN 2006 funfly in Kohiong
 Date: 2006/12/09
Date: 2006/12/09
Time: 10:00-15:00
Location: in front of the Kaohsiung Museum of Fine Arts
ALIGN held the activity for popularizing the RC helicopters and of course also their products. They invited 3 famous RC helicopter pilots, Alan Szabo Jr., Jason Krouse and Nigel Brown to make amazing 3D flying shows.
It is not easy for me to have the opportunity to meet these famous men face to face. Therefore, I invited some of my friends to attend the activity. They were very happy to see these RC pilots and thier stunting 3D flight.

However, I missed the most improtant show in that afternoon. I thirsted so much and then went to buy some iced drink. Unfortunately, I got into a traffic jam and couldn't get back to the field to enjoy the show!! Also, I missed the chance to take photos with all the people in the activity... Orz

 After I was back to the field, all the shows was over!! What I could
After I was back to the field, all the shows was over!! What I could do was just to ask Alan, Jason and Nigel to autograph on the back of my visiting card. Finally, I took the photo with Alan and my friends. :-)
do was just to ask Alan, Jason and Nigel to autograph on the back of my visiting card. Finally, I took the photo with Alan and my friends. :-)
Tuesday, December 12, 2006
[Heli] T-rex flight at HIGH altitude (2280 m)
How high can the small electric helicopter fly at? Someone asked me about this when they saw me fly T-rex in front of our institute's building.
All I can say is only "Oh, very high, far beyond you can see it."
On December 1st, 2006, our lab went to the Southern Cross-island Highway for calibrating one of our altimeter. I took the T-rex with us because I just curious about the performance of T-rex at high altitude.
After the flight test, I can tell you "It still perform good for hovering at 2280 meters high." At that height, the air density is 80% of that at sea level.







All I can say is only "Oh, very high, far beyond you can see it."
On December 1st, 2006, our lab went to the Southern Cross-island Highway for calibrating one of our altimeter. I took the T-rex with us because I just curious about the performance of T-rex at high altitude.
After the flight test, I can tell you "It still perform good for hovering at 2280 meters high." At that height, the air density is 80% of that at sea level.







[Heli] Unmanned Helicopter Project: H-LING
H-LING is one project of our lab. It is supported by National Science Council.
Our goal is to make the helicopter hover automatically. There were many flight tests to get data for system identification or some kind of analysis.
I am very lucky to involve in this project. For testing the vehicle, I have many opportunities to flight the helicopters. They are Raptor-90, 50, and even Hirobo Freya.
Here are some photos about our flight test on Novemver 24th, 2006.
 Raptor-90 was ready to take off. I just checked it before our test pilot's coming.
Raptor-90 was ready to take off. I just checked it before our test pilot's coming.
 I was talking to our test pilot (Tan Po-hu, the left one) to let he know what kind of flight data we want to get.
I was talking to our test pilot (Tan Po-hu, the left one) to let he know what kind of flight data we want to get.
 Our H-LING vehicle (Raptor-90) with the onboard computer and sensors.
Our H-LING vehicle (Raptor-90) with the onboard computer and sensors.
Our goal is to make the helicopter hover automatically. There were many flight tests to get data for system identification or some kind of analysis.
I am very lucky to involve in this project. For testing the vehicle, I have many opportunities to flight the helicopters. They are Raptor-90, 50, and even Hirobo Freya.
Here are some photos about our flight test on Novemver 24th, 2006.
 Raptor-90 was ready to take off. I just checked it before our test pilot's coming.
Raptor-90 was ready to take off. I just checked it before our test pilot's coming. I was talking to our test pilot (Tan Po-hu, the left one) to let he know what kind of flight data we want to get.
I was talking to our test pilot (Tan Po-hu, the left one) to let he know what kind of flight data we want to get. Our H-LING vehicle (Raptor-90) with the onboard computer and sensors.
Our H-LING vehicle (Raptor-90) with the onboard computer and sensors.
Monday, October 30, 2006
[Heli] (?) PicooZ

Several weeks ago, I met this tiny guy in Meng-ka model shop. It is a very cute "helicopter" controlled by only 2 channels. Then, one our lab's member found it on the website. After watching the flight demo video, almost everyone got into crazy about this tiny heli-- PicooZ!!
Finally, we bought 13 PicooZs. 9 of them belong to our lab. Suddenly, our lab becomes the lab that keeps the most helicopters (around the world?)...
Monday, October 09, 2006
[Chat] Justin Chi-- Amazing child flying RC
This boy is really cool. Please check the following link to get more information and video of him:
3 Year Old - Justin Chi - 3D Flying Video Link
3 Year Old - Justin Chi - 3D Flying Video Link
[Heli] T-Rex indoor hovering
After I can hover the KALT30, I still crashed the T-Rex twice when I tried to hover it. Till then, I realized that smaller helicopter is not easier to control.
Several days ago, one of my junior in our lab want to test his spy camera with the helicopter. We mounted this camera on the T-Rex and decided to test it indoors. I think it is my first time to hover T-Rex in such a small room. It is really tense! Fortunately, I hovered it without any accidents.
Here is the video: http://www.youtube.com/watch?v=CRnSMfQSPx4
Several days ago, one of my junior in our lab want to test his spy camera with the helicopter. We mounted this camera on the T-Rex and decided to test it indoors. I think it is my first time to hover T-Rex in such a small room. It is really tense! Fortunately, I hovered it without any accidents.
Here is the video: http://www.youtube.com/watch?v=CRnSMfQSPx4
Wednesday, September 27, 2006
[Heli] S-70C in NCKU
The video: http://www.youtube.com/watch?v=xvOwLPF2mes
I talked with my friends in our lab after the lunch. Suddenly, I glanced a REAL helicopter landing on our filed!! Wow, it is so seldom to see a real helicopter fly in the campus.
I went to the site with my digital camera and took some photos and video.
To see the real one in our campus is really interesting. I like it.
Realted link: http://www.taiwanairpower.org/af/s70c.html
I talked with my friends in our lab after the lunch. Suddenly, I glanced a REAL helicopter landing on our filed!! Wow, it is so seldom to see a real helicopter fly in the campus.
I went to the site with my digital camera and took some photos and video.
To see the real one in our campus is really interesting. I like it.
Realted link: http://www.taiwanairpower.org/af/s70c.html

Sunday, September 24, 2006
[Heli] Smaller is harder

Before I can hover the RC helicopters, I always think that small electrical helicopters are easier than the bigger one with engines.
I am WRONG!
R90 is really stable and I can hover it pretty good. Hovering the cute T-rex, however, is totally another story... The T-rex is always sensitive and drift around. I have to hover it with my fully concentration.
 But, flying the small T-rex won't induce much mental pressure. The most important is... T-rex produces NO smoke... :-p
But, flying the small T-rex won't induce much mental pressure. The most important is... T-rex produces NO smoke... :-p(The garbage on the field is really make me upset... I think I should pick them up...)
[Chat] Sorry... It's really too smoky... Orz

After checking this photo, I have to say: "Yes, it is really too smoky... Sorry!"
Wednesday, September 13, 2006
[Chat] Your Heli is too Noisy and Smoky!!
I flew R30 and R50 several times in fromt of our institute building. There is a fine hovering location with grass.
But... I have been complained tiwce for the heli's noise and smoke... Orz
I think I have to find some way to carry R50 to another more suitable place to fly it. How? I have no car!! Although I can carry it with my motorcycle, it is so inconvenient!
:-(
But... I have been complained tiwce for the heli's noise and smoke... Orz
I think I have to find some way to carry R50 to another more suitable place to fly it. How? I have no car!! Although I can carry it with my motorcycle, it is so inconvenient!
:-(
Sunday, September 10, 2006
[Heli] Head-in Hovering
 I tried to hover the T-rex head-in one more month ago. I did it! but not good enough. T-rex even flied too far away so that I cannot handle it. Of course it dropt from about 3 or 4 meters height. Only minor damage ocuured, Lucky!
I tried to hover the T-rex head-in one more month ago. I did it! but not good enough. T-rex even flied too far away so that I cannot handle it. Of course it dropt from about 3 or 4 meters height. Only minor damage ocuured, Lucky!After self-training in the simulator, I think it is time to try again. I took the T-rex outdoor yesterday, and hovered it tail-in then head-in. This time, I held it in better situation and the T-rex landed with some minor accidents. So far, I have more confidence with the head-in hovering.
Today I and my junior, Weoileong, took R-50 Titan to do its maiden flight. In fact, it had been flew and tuned by Tan Bun-jin, who is the boss of Beng-ka R/C model shop. So, maybe I should say that today is our maiden flight with the new R-50.
Oh, it must be mentioned that today is Woeileong's first flight with the R/C helicopter. He did pretty well in the simulator, and I think he can do the real hovering.

I started the engine smoothly (new is good~~), and then tried to do the hovering. After some trim on the transmitter, R-50 performed better than my expectation. I hoered it tail-in, and then, again, I turned the R-50 with the tail rotor. I did the head-in hovering!
Today's flight is Woeileong's first hovering with real R/C heli, and is also my first head-in hovering with glow engine heli. Today is a memorable day! :-D
Saturday, August 05, 2006
[RC] Futaba connector

I am working on a project with R-90 as the vehicle. Today I want to connect the FF9 transmitter to an FM transceiver, but I find that the FF9's connector type is the "square" one. This type is so different from the original type.
From Google, I find some website describe the pins of the FF9's connector:
Of course, I check all the pins with the oscilloscope to make sure everything is OK. I also get a female 6-pin DIN plug from an old FF4 transmitter.
Finally, I make a new connector cable with 2 different plugs. It works. :-)

Sunday, July 09, 2006
[Heli] Great flight video
This was one of Japanese indoor heli competition on TV. 2 players completed all the items and won the prizes (900,000 Yen per person)
Video
And these were performed by Alan Szabo Jr... Really amazing!
Video 1
Video 2
Video
And these were performed by Alan Szabo Jr... Really amazing!
Video 1
Video 2
Monday, June 19, 2006
[AC] Apollo Mission... FAIL!!
 Date: 16, June, 2006
Date: 16, June, 2006Time: ~8:00-9:00?
Location: Chan-bûn-khe, Sai-káng tōa-kiô
Weather: Sunny day!!
I have not fly RC aircraft for several years. Recently, I pick up some "remeains" in our lab, and plan to build up an aircraft for some simple flight test (e.g. new GPS receiver or other payload test).
After about 2 days' efforts, I assemble a 30 class RC aircraft named APOLLO, because its wing has this word. I have no idea where this wing come from. I choose this wing becuse its wingspan is about 180 cm, longer than other normal one's wingspan from 130 cm to 140 cm. I think this wing could offer more lift then I can use this APOLLO to carry more payload for some test.
But I never think this choice could affect the flight characteristic so much that might be one of the causes induced APOLLO's crash.
I pushed the throttle stick to lift up APOLLO. Just after its take-off, I realise that my skill is not good enough to fly it properly. APOLLO performed good lift ability but was poor in the rolling maneuver. The roll of APOLLO seemed a little stupid. Another problem is the pitch-up trend under higher throttle. These conditions increased my loads as flied APOLLO.
Luckily, I landed it safely on the grass field (actually I should land it on the runway, but I can't control it very well). After some adjustment about the nose gear (it had a trend to make APOLLO run to the right side), I took APOLLO off again.
 Because when I trimmed the nose gear, I also trim the transmitter via the rudder channel. This trim made the rudder deflect to right a little, but I didn't notice it. Therefore, after the long wingspan aircraft took-off, it always turned right! I didn't think about the rudder's trim, I just tried to turn it to left by aileron and took it back.
Because when I trimmed the nose gear, I also trim the transmitter via the rudder channel. This trim made the rudder deflect to right a little, but I didn't notice it. Therefore, after the long wingspan aircraft took-off, it always turned right! I didn't think about the rudder's trim, I just tried to turn it to left by aileron and took it back.APOLLO suffered stall twice because the pitch-up trend just mentioned proviously. When it stalled the second time, it was too far for me to recognize its attitude. Then APOLLO began to dive, and I tried to save it back by pull the elevator. Suddenly, I saw one side of the wing flipped!! Of course, APOLLO crashed. =__="
Comments:
- To change the wing will alter the flight characteritics very much
- Longer wing is more sensitive about the rudder's deflection. It induce obvious trend of "yaw and roll"
- APOLLO maybe not a good name of a project...
Wednesday, May 17, 2006
[Heli] Hirobo Lama
Lama is a cute tiny electrical helicopter with coaxial main rotors . Our lab bought it for some experimeantal purpose but fail due to its poor payload carrying capability.

 It have not been flew for a long time. I took it out and charged the batteries, then flew it. It is really very stable and tough.
It have not been flew for a long time. I took it out and charged the batteries, then flew it. It is really very stable and tough.
You can hover it and do some adjustment, then free your hands from the transmitter for several seconds with Lama "auto hovering" by itself.
Although one of its balde was bent in a minor crash, it still fly well!! Lama is really easy and strong for the beginners.

 It have not been flew for a long time. I took it out and charged the batteries, then flew it. It is really very stable and tough.
It have not been flew for a long time. I took it out and charged the batteries, then flew it. It is really very stable and tough.You can hover it and do some adjustment, then free your hands from the transmitter for several seconds with Lama "auto hovering" by itself.
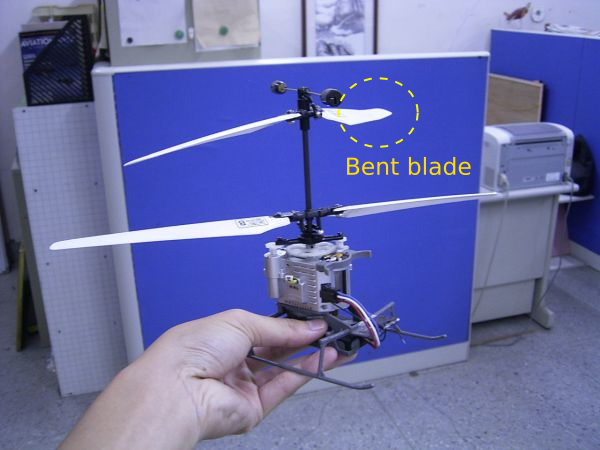
Although one of its balde was bent in a minor crash, it still fly well!! Lama is really easy and strong for the beginners.
Wednesday, May 10, 2006
[Heli] T-rex try again
I reinstalled the original landing skid on the T-rex and flew it again just about 1 hour ago.
It seems something wrong with the power set. T-rex cannot hold its power for a long enough period. It always suffer from power loss. I think maybe the speed controller didn't be set properly.
I have to consult someone experienced, maybe Po-hu, maybe Beng-ka R/C model shop...
It seems something wrong with the power set. T-rex cannot hold its power for a long enough period. It always suffer from power loss. I think maybe the speed controller didn't be set properly.
I have to consult someone experienced, maybe Po-hu, maybe Beng-ka R/C model shop...
Tuesday, May 09, 2006
[Heli] Raptor 30 with CCD camera tracking
 Several months ago, my junior Scott plan to use small electric helicopter (T-rex) to carry his CCD camera for tracking experience. After several tests, we still cannot reduce all the hardware's weight to as light as T-rex can lift up.
Several months ago, my junior Scott plan to use small electric helicopter (T-rex) to carry his CCD camera for tracking experience. After several tests, we still cannot reduce all the hardware's weight to as light as T-rex can lift up.In fact, we once thought that my skill is not good enough to handle the T-rex with heavy payload. After Po-hu's flight test,
 however, we realized that the hardware is too heavy for our poor T-rex. Even we change the battery and speed controller, the T-rex still have a "power drop" after its take-off. I believe it was due to the over weighted payload. The weight induced over current and then triggered the speed controller's protection mechanism to reduce the battery's electric output.
however, we realized that the hardware is too heavy for our poor T-rex. Even we change the battery and speed controller, the T-rex still have a "power drop" after its take-off. I believe it was due to the over weighted payload. The weight induced over current and then triggered the speed controller's protection mechanism to reduce the battery's electric output.So we decided to change the platform, from T-rex to the Raptor-30. The Raptor-30 is an old helicopter from Po-fu. Scott installed his CCD camera and other hardware on this old Raptor, and I flew it this afternoon. Altough my skill is not good, the Raptor still complete its work, and Scott obtained the experimental results he wants! :-)

Here is the photo of the transmitter, FF-7, also from Po-fu. It is the oldest one I have used so far.
After the flight today, I think my hovering skill have to be improved... :-p
Monday, May 08, 2006
[Talk] Keep hovering
Oh, I have not written my experiments for a long time... In fact, I have flown several RC helicopters, but I didn't write down that because of my laziness.
I will be back... :-p
I will be back... :-p
Tuesday, February 21, 2006
[Heli] T-rex landing skid modification
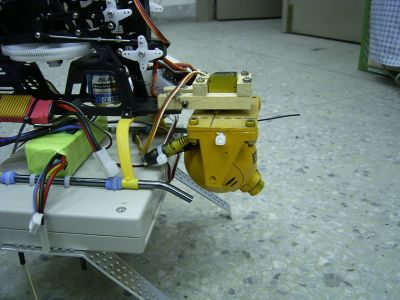
These days, one of my junior Scott is wroking hard on the landing skid modification and trial for the T-rex. We need a "higher" landing skid for efficient space to mount some equipments.
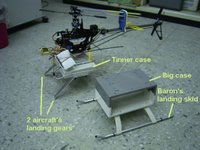 Original design is to put T-rex on an big case, then fix this case on one of my Baron's landing skid. This big case is for equipping experiment's sensors or hardwares. Unfortunately, this arrangement does not work. It suffers extreme vibration! This unwanted vibration does not passed even when T-rex takes off. Therefore, Scott searches for another design.
Original design is to put T-rex on an big case, then fix this case on one of my Baron's landing skid. This big case is for equipping experiment's sensors or hardwares. Unfortunately, this arrangement does not work. It suffers extreme vibration! This unwanted vibration does not passed even when T-rex takes off. Therefore, Scott searches for another design.
A thinner case is used, and this considerably reduces the vibration. Scott found the aluminium landing gear for small R/C aircrafts yesterday, and he decided to use it to replace the Baron's landing skid.
We test the newest landing skid today afternoon, but T-rex cannot take off smoothly. Maybe the c.g. (center of gravity) is not at proper location, and also T-rex is not adjusted to a good situation. All these, of course, are due to my immature R/C experiences. :p


The yellow sphere is Scott's gimbaled CCD camera set. It's nickname is "紅の豚", and this name means "Red pig".
 Original design is to put T-rex on an big case, then fix this case on one of my Baron's landing skid. This big case is for equipping experiment's sensors or hardwares. Unfortunately, this arrangement does not work. It suffers extreme vibration! This unwanted vibration does not passed even when T-rex takes off. Therefore, Scott searches for another design.
Original design is to put T-rex on an big case, then fix this case on one of my Baron's landing skid. This big case is for equipping experiment's sensors or hardwares. Unfortunately, this arrangement does not work. It suffers extreme vibration! This unwanted vibration does not passed even when T-rex takes off. Therefore, Scott searches for another design.A thinner case is used, and this considerably reduces the vibration. Scott found the aluminium landing gear for small R/C aircrafts yesterday, and he decided to use it to replace the Baron's landing skid.
We test the newest landing skid today afternoon, but T-rex cannot take off smoothly. Maybe the c.g. (center of gravity) is not at proper location, and also T-rex is not adjusted to a good situation. All these, of course, are due to my immature R/C experiences. :p

The yellow sphere is Scott's gimbaled CCD camera set. It's nickname is "紅の豚", and this name means "Red pig".
Thursday, February 16, 2006
[Heli] T-Rex maiden flight

New metal tail elements, new main rotor blades... T-Rex seems ready to take-off!! Okay, in fact it's my eagerness to flight it. :p
I have setup all waht I know, and trim anything I could to do. Of course, there must be something I ignored or did not know.
In fact, Lab's members told me waiting for our pilot Tan Po-hu to test T-rex and adjust it. However, I can not put the helicopter on the table and watch it without imaging flying it!! My fingers told me "Fly~~ Fly it~~", and my mind told me "Warriors are willing to die in the battle rather than die in the peace! So does the T-Rex!! It maybe crash, but crash is far better than be stored to be ruined!!"
So, I and my 2 juniors took the T-rex and some stuff to the grass in front of our institute's building.
At the beginnig, T-rex always tilts its body before lifting off. It was really like a drunk, and we all worried about its safety (and of course ours, too). After several trials, T-rex lifted off the grass! Even I still cannot hover it, but the "control feeling" come up. It's a good start, but the transmitter's battery went into low power. Therefore, we end today's flight test with T-Rex "complete". :p
The following pictures are that T-Rex is "drunk"...




Thursday, February 09, 2006
[GPS] The Smallest Receiver by Rakon
Rakon Develops World's Smallest Receiver
Photo: http://www.ubergizmo.com/15/archives/2006/01/rakon_presents.html
I read this news on Taiwan Daily. It is a really interesting and exciting information, but I can only find some surface descriptions.
I wonder if the receiver integrated with antenna or not.
If you have any further information such as technical facts, I will appreciate your share. :-)
Photo: http://www.ubergizmo.com/15/archives/2006/01/rakon_presents.html
I read this news on Taiwan Daily. It is a really interesting and exciting information, but I can only find some surface descriptions.
I wonder if the receiver integrated with antenna or not.
If you have any further information such as technical facts, I will appreciate your share. :-)
Wednesday, February 08, 2006
[Heli] SR-3 mode of FF9 transmitter
Yseterday I learned more about the setting of electric helicopters.
I have to thank God for not let the T-rex take off or there might be a crash. T-rex takes a swashplate design with 3 inputs at 120°. I have no idea that I should select "SR-3" type in the transmitter. Therefore, I cannot figure out why the servos' motion lead to such a strenge movements of the swashplate. For example, why the pitch stick didn't make a "collective" pitch movement? But only tilted one side of it?
 Consulting an introduction article, I know that I misunderstood the meaning of CCPM (Cyclic/Collective Pitch Mixing). I always think that CCPM is a particular type of mechanism design which use 3 servos' inputs with 120° arrangement. Hence when I saw the strenge movement of the T-rex's swashplate, I supposed that it is because of the CCPM's design. In fact, it is just because that I didn't choose correct transmitter's parameters (the SR-3 type).
Consulting an introduction article, I know that I misunderstood the meaning of CCPM (Cyclic/Collective Pitch Mixing). I always think that CCPM is a particular type of mechanism design which use 3 servos' inputs with 120° arrangement. Hence when I saw the strenge movement of the T-rex's swashplate, I supposed that it is because of the CCPM's design. In fact, it is just because that I didn't choose correct transmitter's parameters (the SR-3 type).
Besides, consulting the Nigel Fraser Ker's tutorial article, I learned about the knowledge of throttle cuve and pitch curve. It has confused me for many years and I never take it seriously due to my own laziness.
Tips:
I have to thank God for not let the T-rex take off or there might be a crash. T-rex takes a swashplate design with 3 inputs at 120°. I have no idea that I should select "SR-3" type in the transmitter. Therefore, I cannot figure out why the servos' motion lead to such a strenge movements of the swashplate. For example, why the pitch stick didn't make a "collective" pitch movement? But only tilted one side of it?
 Consulting an introduction article, I know that I misunderstood the meaning of CCPM (Cyclic/Collective Pitch Mixing). I always think that CCPM is a particular type of mechanism design which use 3 servos' inputs with 120° arrangement. Hence when I saw the strenge movement of the T-rex's swashplate, I supposed that it is because of the CCPM's design. In fact, it is just because that I didn't choose correct transmitter's parameters (the SR-3 type).
Consulting an introduction article, I know that I misunderstood the meaning of CCPM (Cyclic/Collective Pitch Mixing). I always think that CCPM is a particular type of mechanism design which use 3 servos' inputs with 120° arrangement. Hence when I saw the strenge movement of the T-rex's swashplate, I supposed that it is because of the CCPM's design. In fact, it is just because that I didn't choose correct transmitter's parameters (the SR-3 type).Besides, consulting the Nigel Fraser Ker's tutorial article, I learned about the knowledge of throttle cuve and pitch curve. It has confused me for many years and I never take it seriously due to my own laziness.
Tips:
- The linkage about the swashplate could be adjusted by mecahnical or digital way
- Make sure the parameters of the transmitter is correct
- Good tutorial information could reduce the cost and time considerablely
Monday, February 06, 2006
[Heli] Test of T-REX 450XL CCPM (2)

I repaired the landing skid and replace the plastic CCPM swash plate with a metallic one for T-rex. It looks good!
With the experience yesterday, I have more confidence with today's test. However, I still made some stupid mistakes: Flight without checking all the control surfaces' motion.
The rolling motion is reversed but I was not aware of it. This negligence led to a wrong rolling motion when T-rex was ready to lift up. Again, God blessed this poor helicopter. The main rotor hit the ground, but no visible damage occured.
After correcting the servo's setting of the transmitter, I tried to test T-rex again. Suddenly, one tail blade shoot off!! I am not sure what is the cause. Maybe the tail rotor was damaged in yesterday's "accident", or maybe I didn't screw the tail blade properly.
Actually, T-rex did not really take off. Because I didn't dare to lift it off in our lab's small space, it just slided over the ground.
I will take it to a wider place for next flight test. Of course, it will take off... I hope so...
GOOD habits before flight:
- Check all the control surfaces' motion
Saturday, February 04, 2006
[Heli] Test of T-REX 450XL CCPM
After 4 days' efforts, I assemble my first electric RC helicopter. It is not a easy work for me, especially that I have no any experience before.
I follow the instuction manual step by step, and of course do something wrong then correct them. The kit is pretty precise except for the tail boom. The boom has a notch to joint helicopter's body rightly. However, according to its notch, the tail rotor will not be in right angle but somewhat tilt downward. Therefore some modification was done.
In fact, it is not my own helicopter. This small guy is a testbed in my lab. It will carry some equipment to do some experiments. I and my juniors all expect it can take-off and hover smoothly, then we can carry out our experiments during these 2 days.
Unfortunately, because of my lack of related knowledge about electric helicopter, the T-rex breaks one of its landing skid.
When I turn on the transmitter and connect the power on T-rex, then push up throttle slightly... Nothing happened... I think the ESC (Electrical Speed Controller) may be the problem. Because I know nothing about brushless motor and the related ESC, I think that I do something wrong with the ESC. After consulting the manual and do some setting, the main rotor start rotating! Good! but something not normal!! I can't control the RPM!!
 The helicopter rotates its balde faster and faster. In that moment I remember that may be the throttle is reversed, and then push up the throttle stick of the transmitter to the end. However, the RPM seems not reduced. I still have no idea that the ESC has a "slow starting fuction" which makes the RPM increase steady and slowly. In other words, this function confused me when I want to reduce the RPM of main rotor.
The helicopter rotates its balde faster and faster. In that moment I remember that may be the throttle is reversed, and then push up the throttle stick of the transmitter to the end. However, the RPM seems not reduced. I still have no idea that the ESC has a "slow starting fuction" which makes the RPM increase steady and slowly. In other words, this function confused me when I want to reduce the RPM of main rotor.
Finally, I pull down the throttle to the end, and it is really a disaster. The throttle is reversed, so pull down the throttle means increase the RPM!!
Poor T-rex speed up then roll right quickly. It hits one table and only breaks one of its landing skid. It's really a miracle that no more damage on this helicopter.
This is a astonish but good experience to me. I should not mount the motor on the helicopter before I test its running.
GOOD test steps:
If you have a electric helicopter and you are also a beginner like me, this test "report" may be useful to you. :-)
I follow the instuction manual step by step, and of course do something wrong then correct them. The kit is pretty precise except for the tail boom. The boom has a notch to joint helicopter's body rightly. However, according to its notch, the tail rotor will not be in right angle but somewhat tilt downward. Therefore some modification was done.
In fact, it is not my own helicopter. This small guy is a testbed in my lab. It will carry some equipment to do some experiments. I and my juniors all expect it can take-off and hover smoothly, then we can carry out our experiments during these 2 days.
Unfortunately, because of my lack of related knowledge about electric helicopter, the T-rex breaks one of its landing skid.
When I turn on the transmitter and connect the power on T-rex, then push up throttle slightly... Nothing happened... I think the ESC (Electrical Speed Controller) may be the problem. Because I know nothing about brushless motor and the related ESC, I think that I do something wrong with the ESC. After consulting the manual and do some setting, the main rotor start rotating! Good! but something not normal!! I can't control the RPM!!
 The helicopter rotates its balde faster and faster. In that moment I remember that may be the throttle is reversed, and then push up the throttle stick of the transmitter to the end. However, the RPM seems not reduced. I still have no idea that the ESC has a "slow starting fuction" which makes the RPM increase steady and slowly. In other words, this function confused me when I want to reduce the RPM of main rotor.
The helicopter rotates its balde faster and faster. In that moment I remember that may be the throttle is reversed, and then push up the throttle stick of the transmitter to the end. However, the RPM seems not reduced. I still have no idea that the ESC has a "slow starting fuction" which makes the RPM increase steady and slowly. In other words, this function confused me when I want to reduce the RPM of main rotor.Finally, I pull down the throttle to the end, and it is really a disaster. The throttle is reversed, so pull down the throttle means increase the RPM!!
Poor T-rex speed up then roll right quickly. It hits one table and only breaks one of its landing skid. It's really a miracle that no more damage on this helicopter.
This is a astonish but good experience to me. I should not mount the motor on the helicopter before I test its running.
GOOD test steps:
- Do NOT mount the motor on helicopter. Test the power system alone
- Turn on the transmitter
- Connect motor, ESC, receiver and battery properly
- Try the throttle response
- Make sure that the motor can handle via the transmitter, especially the "turn-off"
If you have a electric helicopter and you are also a beginner like me, this test "report" may be useful to you. :-)
Subscribe to:
Comments (Atom)